




机械检测时如何单自由度角位移的测量
发布时间:2016-11-02
直接测量平面内的角位移量时,对于大角位移常采用圆光栅、圆磁栅、圆感应同步器等作为感受元件。若被测的是小角位移,则可使用电位计式,磁敏式、差动变压器式等小角位移传感器,也可采用干涉原理进行测量(原理类似于激光小角度测量仪)。

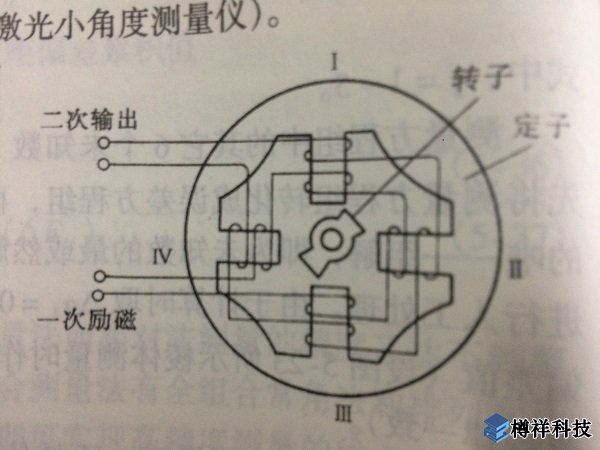
图5-24所示为微动同步器的结构原理图,其工作原理与差动变压器类似,但结构较其简单)微动同步器由四极定子和两极转子组成,定子每极有两个线圈,各级分别串成一次励磁回路和二次感应回路。一次线圈通人励磁电流后,随着转子转动在二次线圈中产生两两相反的感应电动势,输出电压是四极上感应电动势的两两之差。测量时,转子与被测体作同步转动,从而不断改变定子四极与转子间的气隙,造成各极磁通量的变化,使二次感应回路输出一个正比于转子角位移的电压量。微动同步器的测量范围为±100。
平面内的角位移也可使用间接法测量,如通过测量一段时间内被测物体的角速度、角加速度等参数,求得相应的角位移。较典型的是利用各种原理的陀螺式仪器,特别是近二三十年发展起来的激光陀螺,如前面介绍的环形激光器。由于它具有测量范围大,耐高加速度,对环境的适应能力强,结构简单,成本低等突出优点,所以引起各***的重视并得到越来越广泛的应用。陀螺仪的原理和机构在后面章节中还将进一步介绍。
- 上一篇:机械检测超声测量法
- 下一篇:检测维护人员需要了解机械检速度、转速以及加速度测量
