




当今的许多振动数据采集器都能够支持两个或多个传感器同时采集数据。通过此功能,可以选择跨通道相位作为分析工具。除了带有用于正常振动路径的传感器的分析仪和电缆外,执行跨通道相位所需的***额外工具是另一个电缆和传感器。跨通道相位分析可以发现结构松动源,一些结构完整性问题,未对准条件甚至结构共振条件。
它是如何工作的?
正常路线数据采集捕获多个正弦波并根据频率将它们分开。然后它将它们显示为单***的频率,其各自的幅度为光谱格式。相位分析选择单个正弦波(单频)并检测振动源相对于其他东西的移动方式。“其他东西”可以是轴上的点,例如反射带或关键相位器,或者如跨通道相位的情况下的另一振动信号。
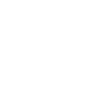
因此,有两个信号被比较:振动信号和由反射带通过触发的转速计脉冲,或来自关键相位器的脉冲。转速计脉冲产生方波,而振动信号发出正弦波。
比较两个源的峰值的时间,并且两个峰值之间的时间差以度为单位显示,因为两个源都与旋转运动有关。这对于平衡旋转设备非常有效,因为来自反射带前缘的脉冲,振动峰值(或高点)会在很多度后发生,表明轴上可能存在重点。(本节不会解决可能导致重点与高振动点不同的情况。请注意可能是这种情况。)
在跨通道相位中使用两个传感器,比较是每个信号的振动峰值。能够进行跨通道相位的分析仪还允许您指定要监视的特定频率。大多数情况下,选择转轴速度作为感兴趣的频率。
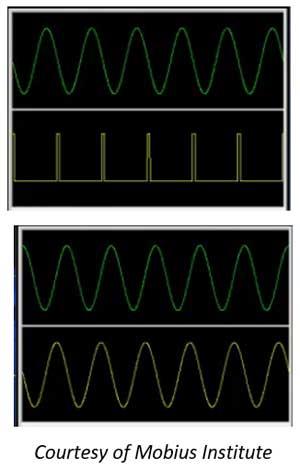
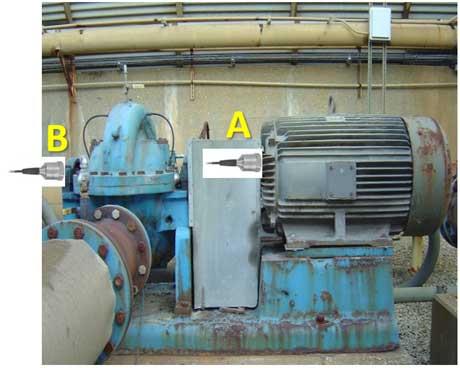
典型的起点是将传感器A放置在电机的外侧垂直端,将传感器B放在电机支脚上,以查看这些点相对于彼此的移动方式。通常将一个传感器保持在相同位置,即位置A以与其他几个点进行比较。对于以下示例,我们假设传感器A读取零度。
如果传感器B读取零度(+ - 30度),则它们一起移动或一致移动,这是预期的正常情况。但是,如果传感器B是180度(总是+ - 30度),那么它将以相反方向或不同步方向移动。这意味着当脚向下移动时,马达壳体的一部分向上移动。这是由于某处电机外壳的裂缝造成的,因此可以将部件分开。通常,裂缝在脚处或附近。记录您的发现。
现在将传感器B移到脚螺栓上。如果传感器B读取零度,则螺栓固定到的板与电机顶部一致移动,解释为螺栓紧固。
但是,如果脚是零度并且螺栓是180度(或180度异相),则脚和安装板之间存在松动。
可以确定基础和地板的相同过程。如果所有这些读取与传感器A相同,则这两个位置之间没有松动。
接下来,将传感器A移动到电机内侧位置,并对电机的那一端执行所有相同的检查。完成后,将传感器A穿过联轴器移至泵内侧端,然后将泵外侧移动,在那里执行检查。请务必在每个位置记录您的发现,以便以后参考和分析。
下一步是将机器列车的读数从一端到另一端进行比较。这应该在垂直传感器方向以及水平传感器方向上完成。关于为什么两个方向出现了一些问题。这可以用另一个问题回答:“机器是否可以垂直对齐而不是水平对齐?”
让我们看一下传感器B在垂直方向上沿着机械列车从轴承移动到轴承的情况。
同样,假设传感器A是静止的并且对于所有这些测量读取零度,与传感器B一起漫游。***个B位置是马达内侧垂直。如果传感器B为零度,则该位置应该没有问题。但是,如果传感器B读数为180度,则电机的这一端向下移动,而A端向上移动。这不是一个好的条件。一种可能导致这种角度不对准的情况。
要验证角度不对中,请将传感器B移至泵内侧位置。如果它在那里读取180度,则很可能是角度不对准条件,因为在角度不对准中,轴一起在联轴器上移动。假设对于该示例,我们确实具有角度未对准的指示。什么是泵外侧轴承预计读数?
将传感器B移动到泵外侧轴承位置,我们期望读数为零以确认角度不对准。在没有错位的情况下,我们预计所有轴承都是同相或零读数。
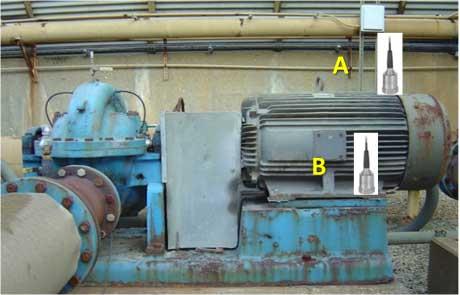
通过将参考传感器,传感器A定位到电动机外侧水平方向,可以在水平方向上进行相同的检查。进行比较,记录所有读数并将传感器B从轴承移动到轴承在机器同一侧的水平方向上。当传感器放在机器的另一侧时会发生什么?
轴向相位读数提供了哪些有用的信息?让我们考虑一下可能性。将传感器A沿轴向放置在电机内侧轴承上,将传感器B放置在轴向外侧泵外侧位置,并比较相位读数。如果它们是同相的,这是预期的。然而,如果它们相位相差180度,则指向角度不对准状态,其中轴在旋转时彼此推压。正如在正常振动读数中一样,轴向相位测量可用于确认未对准条件。
可以使用类似的相位读数比较方法来检查机器基座的结构状况以查看其如何移动。通常,A传感器沿垂直方向安装在电动机外侧轴承上,传感器B用于沿基座漫游。
从基座的电机端开始,传感器B靠近基座的前角。如果该位置的所有垂直读数都是同相的,则相位读数可能与传感器A同相。现在沿着靠近边缘的底座前部以2或3英寸的增量移动传感器B,记录相位读数。如果它们都是同相的,则没有弯曲问题。
接下来,将传感器B移动到机器的背面,并沿那里的基座重复测量。同样,如果一切都是同相的,那么基础弯曲就没有问题。
但是,如果沿着电机和泵之间的区域存在90度或180度的相移,那么会发生什么?在基座的一端和另一端之间可能存在180度相移或360度相移。这表明什么?
如果从前侧的测量到沿后侧的相应位置存在180度相移,会显示什么?会不会有问题?为什么或者为什么不?
振幅怎么样?
相位读数通常有两个可用的组件。一个是以度为单位的实际相位读数,这里已经介绍过。另一个组成部分是振动幅度。在某些分析仪中,设置相位读数的选择称为峰值和相位,振动的峰值幅度和相位读数。相位读数表示它正在移动的方向,但幅度表示它移动了多少。
在下图中,底部有圆圈,圆圈外侧有一个抽搐标记。tic标记表示相位方向。圆圈内部是速度的振动值,即该频率的典型振动读数。请注意,从左侧开始,振动幅度为每秒0.114英寸。当它前进到底板的中心时,振幅上升到大约每秒0.954英寸。当振幅向右移动时,振幅再次减小。相位在整个距离内保持不变。有问题吗?
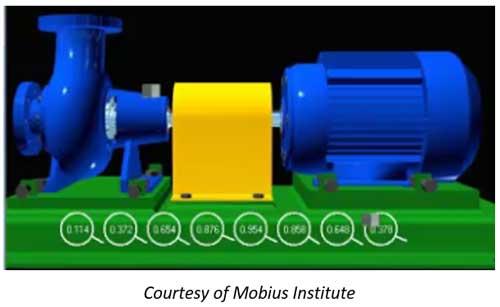
是的,这表明基础刚度问题允许它在中心移动更多。它是按照它的设计方式灌浆的吗?让工程师参与设计一种加强基础的方法,不会对任何其他区域产生不利影响。
有人会说,该区域增加的振动表明它处于共振状态。然而,无论何时涉及共振条件或固有频率,都存在相变。基本上没有相位变化,排除了共振。
摘要
跨渠道阶段是大多数双通道分析仪内置的有价值工具,使技术人员/分析人员能够查找或验证某些机械问题。了解机器应如何移动对诊断/确认条件非常有帮助。
