




“如果你想找到宇宙的秘密,请考虑能量,频率和振动。” - 尼古拉·特斯拉
特斯拉的秘密可能是由于转子不平衡导致的振动频率等于轴速度而浪费的能量吗?
平衡转子对于实现生产和利润目标至关重要。不平衡会产生高振动,从而导致其他故障,从而导致机器寿命缩短,能源浪费和效率降低。生产符合客户要求的产品需要平稳运行的机器。IOSR机械和土木工程杂志指出转子不平衡是振动问题的主要原因。良好的平衡过程对于成功的物理资产管理至关重要。
什么是刚性转子?
以低于其临界速度的70%的转速运转的转子被认为是刚性转子。临界速度是通过激发其固有频率而发生共振的速度。百分之九十或更多的转子是刚性的。
什么是不平衡?
转子不平衡可以定义为当几何中心和质心(也称为重心)不重合时存在的条件。实际上,这些中心并不完全一致,但转子平衡的目标是将不平衡减少到机器寿命不会受到残余不平衡的负面影响。平衡技术人员试图将质心和几何中心带到相同的点或足够接近以满足预定的平衡标准。总会有一些残余不平衡。

平衡标准
一些标准组织已经开发出用于各种机器的平衡标准。ISO和API是几个例子。一些公司制定自己的标准。你应该使用哪种标准?选择标准,使您可以实现所需的机器寿命,并将设备功能保持在您的过程所需的水平。这听起来像是一个政治答案,但实际上,标准可能会根据您工厂的要求而有所不同。如果您使用定义明确的物理资产管理流程,则已知要求。
不平衡以盎司/英寸或克/毫米为单位测量。但是,当您在现场平衡时,通常会平衡振动标准,因为更容易确定机器振动水平而不是确定残余不平衡。
不平衡引起的振动与不平衡量成正比。如果由于不平衡引起的振动水平降低到可接受的水平,则不平衡量也达到可接受的标准。
由不平衡引起的力量
- 不平衡会产生转子振动。
- 双倍的不平衡量,以及由于不平衡引起的力量加倍。
- 转子转速加倍,力量翻两番。
不平衡的类型
- 静态或力量
- 一对
- 动态或力与夫妻的结合

转子不平衡的原因
- 铸件中的气孔
- 怪癖
- 密钥长度不正确
- 应力消除失真
- 热变形
- 腐蚀或不均匀磨损
- 存款累积和组件转移
- 不对称的设计和装配错误
- 转子损坏
- 修复工作错误,例如使用错误的连接螺栓或垫圈
在获得振动和相位测量之后执行平衡。平衡有三个要求:稳定振动,稳定阶段,以及测量的振动和相位必须归因于转子不平衡。
在尝试对转子进行现场平衡之前,请遵循以下基本步骤:
- 在机器上执行振动分析。
- 获取径向和轴向振动读数。
- 确保转子清洁。
- 确认转子上没有松动的部件。
- 在尝试平衡之前,请务必纠正其他问题。
- 使用百分表检查总指示跳动(TIR)。
- 删除以前的平衡修正重量。
数据采集器/分析仪可用于执行识别不平衡所需的振动分析。
不平衡是径向力并产生等于轴速的振动频率。径向力有时会在轴向上产生振动,特别是在悬臂或悬臂转子中。在这些转子中,轴向振动甚至可以大于径向振动。径向力导致轴偏转,在轴承中产生轴向振动。
通常,不平衡会产生1倍或轴速度的振动,即总振动的80%或更多。如果1×振动小于80%,则除了不平衡外还怀疑其他问题。这与说明其他频率的振动不应超过总振动的20%相同。在转子可以适当平衡之前,可能需要纠正其他问题。
不平衡总是在所有径向方向上施加相等的力,但是由于不平衡引起的振动在所有方向上几乎不会相等。水平振动通常是幅度最大的,因为大多数机器在该方向上的刚度较小。小心,因为轴承松动和垂直共振等例外情况。
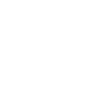
如果径向位置的振动幅度相差5:1或更大,则通常存在其他问题。如果在光谱中可以看到三倍以上的轴速度谐波,则可能存在其他问题,最可能是松动。在尝试平衡转子之前,应该纠正所有其他问题。下图显示了相应的测量和重量校正平面。
转子不平衡的相位指示
在诊断不平衡时,相位是一个非常重要的工具,因为其他几个问题可能会产生1倍的振动。下面显示的相数可能会有15度的变化。
力不平衡相位差:比较两个轴承上相同的径向位置时为0度。
耦合不平衡相位差: 180度时比较两个轴承上相同的径向位置。
动态不平衡相位差:当比较两个轴承上的相同径向位置时,0到180度。
对于所有类型的转子不平衡,在同一轴承上测量时,从水平到垂直的相移应约为90度。在尝试平衡时,该阶段应该是稳定且可重复的。(在调整平衡后它可能会变得不稳定,因为其他问题往往变得更占优势。)不平衡的良好指示是内侧水平(IBH)和外侧水平(OBH)之间的相位差应该等于内侧垂直之间的相位差( IBV)和舷外垂直(OBV)。
相位误差极大地影响平衡。例如,
- 7.5度的相位误差可以产生8:1的减振。
- 15度的相位误差可以产生4:1的减振。
- 30度的相位误差可以产生2:1的减振。
- 60度或更大的相位误差可以不会减少振动。
平衡规则
所有转子,无论其直径/宽度(D / W)比如何,都应在两个平面内平衡。
然而,在悬臂转子上,如果最靠近悬臂质量的轴承中的振动的振幅大约是另一个轴承中振动的四倍,则单平面平衡可能起作用。D / W比为4:1或更大的悬臂转子有时可以通过单平面平衡在公差范围内平衡。
此外,有时狭窄的悬臂转子对双平面平衡反应不佳。在悬臂狭窄的转子上,将两个配重平面的影响分开在两个测量平面上变得更加困难。这仅仅是因为窄转子重量平面彼此非常接近。
要确定是否需要双平面平衡作业,请设置并进行四次测量,但只输入一个校正平面(单个平面)。询问程序估计的减少量。如果估计值在公差范围内,则继续使用单平面平衡。如果估计的减少量超出公差范围,请将设置更改为两个校正平面并继续。
其他转子不平衡指示
时间波形应包含强正弦波分量。加速度测量会使时间波形失真,因为更高的频率会被放大。
稳定的相位和稳定的振幅也是平衡的要求。如果其中任何一个不稳定,请不要将问题诊断为不平衡。有时进行振动测量然后关闭机器可能是明智之举。再次启动机器,查看振动和相位测量是否可以重复。
选择适当的试验重量
适当的试验重量(TW)选择很重要,因为太轻的重量可能无法为计算校正砝码和放置提供足够的响应。试验重量太大可能会破坏机器。试验重量应符合30/30规则:将相位改变30度或将振幅改变至少30%。
计算试验权重
F =转子重量×10%
F =(1.77)×(TW)×(R)×(rpm÷1,000)2
其中:F =以磅为单位的力,TW =以盎司为单位的试验重量,R =以英寸为单位的半径
示例:转子重量为5,400磅,转速为1,800转,半径为13.5英寸
F = 5,400×10%; F = 540
540 =(1.77)x(TW)x(13.5)x(3.24)
540 = 77.4 TW
TW = 6.98盎司
典型的单平面程序
- 按照天平设备制造商的说明在转子上设置设备。
- 进行“参考运行”或“校准运行”,测量振动和相位。
- 添加试验重量。
- 试运行。
- 去除试验重量。
- 添加修正重量。
- 修剪运行。
- 如果需要,添加修剪重量。
- 不超过两次修剪运行。如果需要两次以上的修剪运行才能达到标准,请保留所有重量,删除此平衡作业上收集的数据并重新开始此过程。
典型的双平面程序
- 按照天平设备制造商的说明在转子上设置设备。
- 进行“参考运行”或“校准运行”,测量振动和相位。
- 将试验重量加到1号飞机上。
- 试运行#1。
- 从1号飞机上卸下试验重量并放在2号飞机上。
- 试运行#2。
- 从2号飞机上卸下试验重量。
- 向平面#1和#2添加校正权重。
- 如果需要,进行修剪运行并添加修剪重量。
- 不超过两次修剪运行。
- 如果在两次修剪运行后余额作业不在规格范围内,请将权重保留在原位,删除此余额作业中收集的数据并重新开始此过程。
当转子不能保持平衡时,应怀疑以下问题:
- 热灵敏度
- 在共振附近操作
- 转子腐蚀
- 材料堆积
- 速度变化使机器进入共振状态
- 转子部件松动
“这是一个粉丝,它摇晃所以它必须需要平衡”的心态被称为平衡综合症,可以让你陷入困境。这里有一些技巧可以帮助您避免这些陷阱。
- 时间信号不应太偏离正弦曲线。
- 轴速振动幅度应稳定且可重复。
- 阶段应该稳定且可重复。
- 频谱中应存在不超过三次的轴速谐波。(滑动轴承可能是个例外。)
- 应该没有提高噪声基底。
- 不应存在次谐波。
- 转子应清洁且无积垢。
- 平衡应该是最后的纠正措施(首先纠正明显的问题)。
没有原因,转子不会失去平衡。如果转子已经可接受地平衡并且变得不平衡,则总是试图检测并纠正不平衡的根本原因。有时转子加强角撑板可能会破裂,使转子变形并导致突然的不平衡。如果在不修复裂缝的情况下重新平衡转子,则如果角撑板完全失效,则可能发生突然和灾难性的机器故障。通常可以通过彻底的清洁和检查来避免这些问题。
以位移,速度和加速度测量振动。速度和加速度通常是最常用的单位,但是当平衡转子时,通常使用以密耳为单位测量的位移。这是因为位移在低频时提供***指示,并且您在平衡时处理1倍轴速。技术人员需要意识到,以900转/分钟运行的机器上的1密耳振动与在3,600转/分钟下运行的机器上的1密耳振动不相上下。在3,600转/分钟的机器上施加了相当大的力。
为什么平衡工作出错了
平衡时未能达到所需标准的主要原因包括:
- 设置数据采集器/分析器时出错
- 未能移除试验重量
- 一个不平衡的问题(通常是松散的)
- 将试验重量位置错误地输入平衡仪器
- 悬臂负载需要双平面平衡
- 重量放置不是相对于转子方向的正确方向
- 现有的共振条件
精通转子平衡需要有良好的工具并且熟悉其使用。平衡理论和平衡程序的基础知识对于成功也是至关重要的。掌握振动分析将有助于确保技术人员仅在问题不平衡时执行平衡。由于存在许多变数,仍有一些平衡的艺术。凭借更好的工具和更好的知识,基础平衡已经不再是一门艺术,而是更多的应用科学。
